
Rhonda Johnson
Internet of Vehicles networks are becoming a reality for consumers who use modes of intelligent transportation systems such as autonomous vehicles (Ahmim et al., 2022). Within the Internet of Vehicles infrastructures, as autonomous vehicles increase in society, there is an increased likelihood of such vehicles being used for criminal activity. This article will explore how to conduct a forensic analysis of cyber-attacks against the CAN-Bus protocol of the Internet of Vehicles environment.
CAN Protocols
Connected vehicles use various components, including software and storage features, hardware, and communication protocols. Hardware includes sensors, actuators, and electronic control units (ECUs). ECUs can range in complexity and function and can be as simple as a sensor processor or as complex as applications on an infotainment system (Bozdal et al., 2018). The Internet of Vehicles network has a vast selection of electronic software control units, that control the various functions of the vehicle using a CAN BUS protocol. The CAN Protocol is an in-vehicle communication interface developed by Robert Bosh in 1980. The CAN protocol has a distributed broadcast network architecture, enjoys the benefits of low risk of interference from electrical sources, and has several self-correcting repair features (Bozdal et al., 2018).
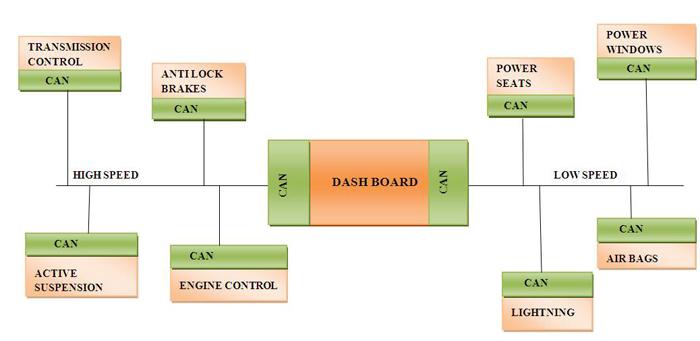
Figure 1. Device Connectivity in CAN Protocol
Source: https://www.engineersgarage.com/can-protocol-understanding-the-controller-area-network-protocol/

| Start of Frame (SOF) | Initiates communication with other electronic control units during incoming.... |
Author
Latest Articles
 OfficialMay 23, 2024Navigating the Abyss: Exploring the Future Trajectory of Dark Web Forensics
OfficialMay 23, 2024Navigating the Abyss: Exploring the Future Trajectory of Dark Web Forensics OfficialFebruary 22, 2024Navigating the Skies of Justice: Digital Forensic Tools for Weaponized Drone Incidents
OfficialFebruary 22, 2024Navigating the Skies of Justice: Digital Forensic Tools for Weaponized Drone Incidents OfficialSeptember 26, 2023Safeguarding Remote Video Identification: A Look at Drone Cybersecurity
OfficialSeptember 26, 2023Safeguarding Remote Video Identification: A Look at Drone Cybersecurity OfficialSeptember 19, 2023Attacks against Controller-Area Network (CAN)-Bus Protocols and Digital Forensic Challenges for Internet of Vehicles Networks
OfficialSeptember 19, 2023Attacks against Controller-Area Network (CAN)-Bus Protocols and Digital Forensic Challenges for Internet of Vehicles Networks